#include <bgtask.h>
◆ bgtask() [1/4]
| us::gov::bgtask::bgtask |
( |
| ) |
|
◆ bgtask() [2/4]
| us::gov::bgtask::bgtask |
( |
function< void()> |
run, |
|
|
function< void()> |
onwakeup |
|
) |
| |
◆ ~bgtask()
| virtual us::gov::bgtask::~bgtask |
( |
| ) |
|
|
virtual |
◆ bgtask() [3/4]
◆ bgtask() [4/4]
◆ is_active() [1/2]
| boolean us.gov.bgtask.is_active |
( |
| ) |
|
|
inline |
◆ is_active() [2/2]
| bool us::gov::bgtask::is_active |
( |
| ) |
const |
|
inline |
◆ isdown() [1/2]
| boolean us.gov.bgtask.isdown |
( |
| ) |
|
|
inline |
◆ isdown() [2/2]
| bool us::gov::bgtask::isdown |
( |
| ) |
const |
|
inline |
◆ isup() [1/2]
| boolean us.gov.bgtask.isup |
( |
| ) |
|
|
inline |
◆ isup() [2/2]
| bool us::gov::bgtask::isup |
( |
| ) |
const |
|
inline |
◆ join() [1/2]
| virtual void us::gov::bgtask::join |
( |
| ) |
|
|
virtual |
◆ join() [2/2]
| void us.gov.bgtask.join |
( |
| ) |
|
|
inline |
◆ reset() [1/2]
| void us::gov::bgtask::reset |
( |
| ) |
|
|
inline |
◆ reset() [2/2]
| void us.gov.bgtask.reset |
( |
| ) |
|
|
inline |
◆ reset_resume() [1/2]
| bool us::gov::bgtask::reset_resume |
( |
| ) |
|
◆ reset_resume() [2/2]
| boolean us.gov.bgtask.reset_resume |
( |
| ) |
|
|
inline |
◆ reset_wait() [1/2]
| bool us::gov::bgtask::reset_wait |
( |
| ) |
|
◆ reset_wait() [2/2]
| boolean us.gov.bgtask.reset_wait |
( |
| ) |
|
|
inline |
◆ resumed() [1/2]
| boolean us.gov.bgtask.resumed |
( |
| ) |
|
|
inline |
◆ resumed() [2/2]
| bool us::gov::bgtask::resumed |
( |
| ) |
const |
|
inline |
◆ run()
| void us.gov.bgtask.run |
( |
| ) |
|
|
inline |
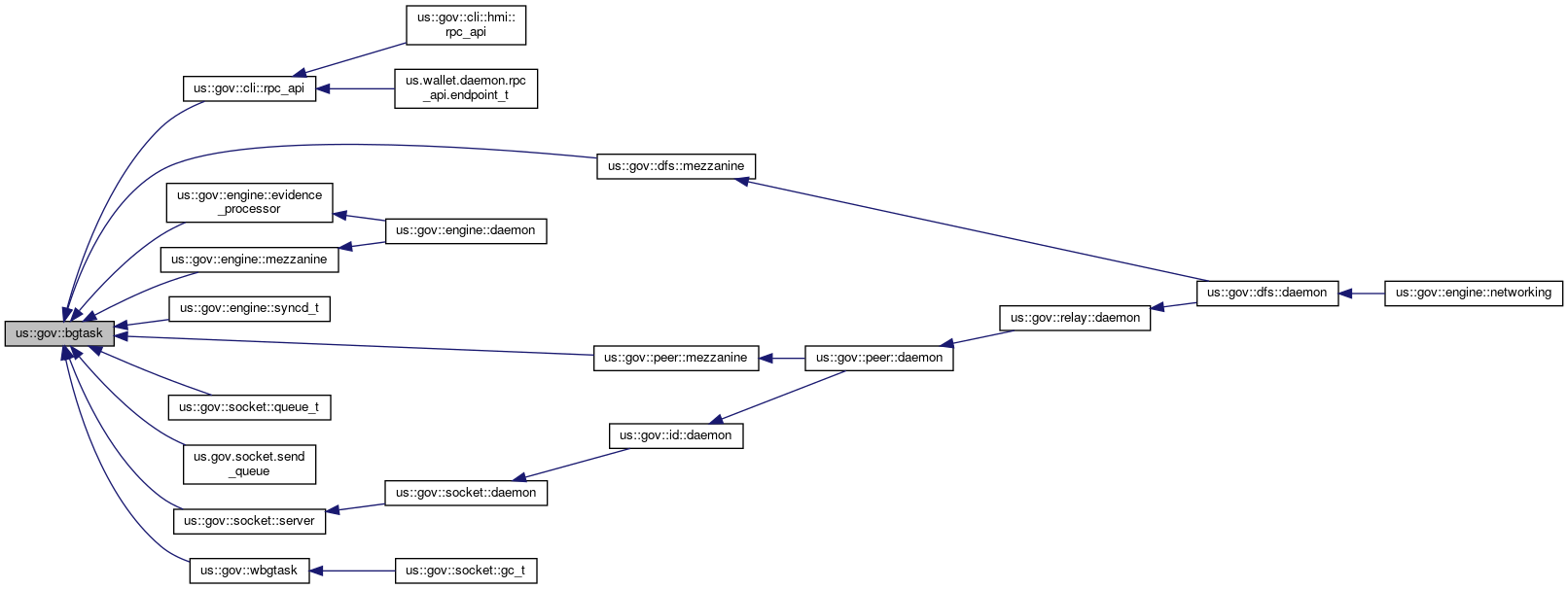
Reimplemented in us::gov::socket::server, us::gov::socket::queue_t, us::gov::peer::daemon, us::gov::engine::syncd_t, us::gov::engine::evidence_processor, us::gov::engine::daemon, us::gov::dfs::daemon, and us::gov::wbgtask.
References active, cb, cv_ready, mx_ready, ready, and us.gov.bgtask.callback.run_body().
◆ run_()
| void us::gov::bgtask::run_ |
( |
| ) |
|
◆ set_callback()
| void us.gov.bgtask.set_callback |
( |
callback |
r | ) |
|
|
inline |
◆ set_run_function()
| void us::gov::bgtask::set_run_function |
( |
function< void()> |
r | ) |
|
◆ start() [1/2]
| virtual ko us::gov::bgtask::start |
( |
| ) |
|
|
virtual |
◆ start() [2/2]
| ko us.gov.bgtask.start |
( |
| ) |
|
|
inline |
Reimplemented in us::gov::socket::server, us::gov::socket::daemon, us::gov::peer::daemon, us::gov::engine::daemon, us::gov::dfs::daemon, us::gov::cli::rpc_api, and us::gov::cli::rpc_api.
References active, cb, us.ok, reset(), and th.
◆ stop() [1/2]
| virtual void us::gov::bgtask::stop |
( |
| ) |
|
|
virtual |
◆ stop() [2/2]
| void us.gov.bgtask.stop |
( |
| ) |
|
|
inline |
◆ wait_ready() [1/2]
| virtual ko us::gov::bgtask::wait_ready |
( |
const chrono::system_clock::time_point & |
deadline | ) |
const |
|
virtual |
◆ wait_ready() [2/2]
| ko us.gov.bgtask.wait_ready |
( |
Date |
deadline | ) |
|
|
inline |
◆ wakeup() [1/2]
| void us::gov::bgtask::wakeup |
( |
| ) |
|
◆ wakeup() [2/2]
| void us.gov.bgtask.wakeup |
( |
| ) |
|
|
inline |
◆ active [1/2]
| bool us::gov::bgtask::active {false} |
|
protected |
◆ active [2/2]
| boolean us.gov.bgtask.active =false |
|
protected |
◆ cb
◆ cv_ready [1/2]
| condition_variable us::gov::bgtask::cv_ready |
|
mutableprotected |
◆ cv_ready [2/2]
| Condition us.gov.bgtask.cv_ready =mx_ready.newCondition() |
|
protected |
◆ KO_81021 [1/2]
| const char* us::gov::bgtask::KO_81021 |
|
static |
◆ KO_81021 [2/2]
| ko us.gov.bgtask.KO_81021 =new ko("KO 81021 Ready status never reached.") |
|
static |
◆ mx_ready [1/2]
| mutex us::gov::bgtask::mx_ready |
|
mutableprotected |
◆ mx_ready [2/2]
| ReentrantLock us.gov.bgtask.mx_ready = new ReentrantLock() |
|
protected |
◆ onwakeup
| function<void ()> us::gov::bgtask::onwakeup |
|
protected |
◆ ready [1/2]
| bool us::gov::bgtask::ready {false} |
|
protected |
◆ ready [2/2]
| boolean us.gov.bgtask.ready =false |
|
protected |
◆ resume [1/2]
| atomic<short> us::gov::bgtask::resume {0} |
|
protected |
◆ resume [2/2]
| AtomicInteger us.gov.bgtask.resume =new AtomicInteger(0) |
|
protected |
◆ run
| function<void ()> us::gov::bgtask::run |
|
protected |
◆ th [1/2]
| thread* us::gov::bgtask::th {nullptr} |
|
protected |
◆ th [2/2]
| Thread us.gov.bgtask.th =null |
|
protected |
The documentation for this class was generated from the following files: